 Structure / features
Structure / features
[Structure] A structure with high precision.
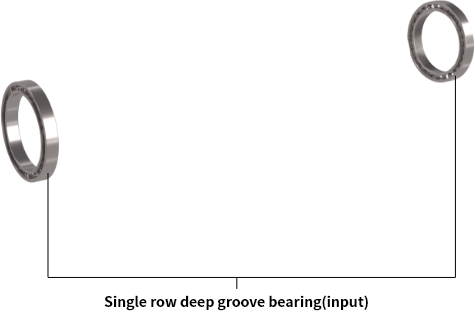

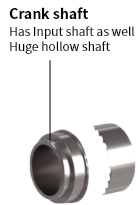
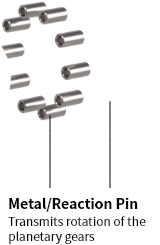
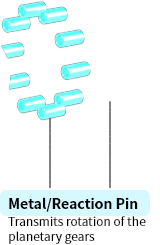





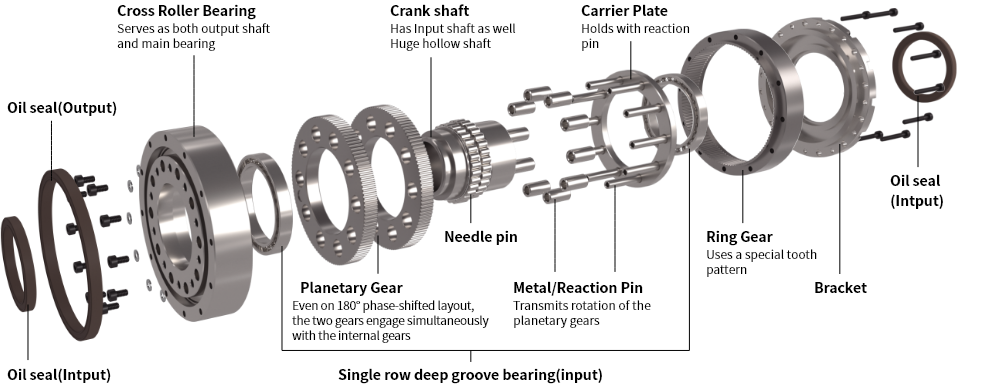
・In accordance with the crankshaft (input shaft) rotation, the two planetary gears revolve while autorotating,
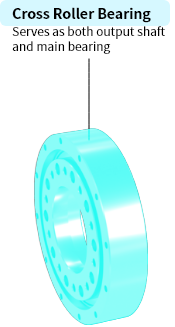
transmitting their movement through the reaction pin and metal to the output cross roller bearing.
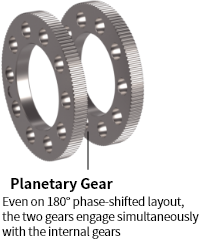
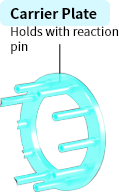
・Even with on a single stage gearing , the two planetary gears ( 180° offset ) can phase simultaneously
and engage with internal gears, avoiding imbalance during rotation.
[Features] Large Hollow Shaft with High Stiffness and High Torque
The use of a differential reducer mechanism (eccentric oscillation type) achieves high torsional rigidity and allowable torque. Because the gear engagement ratio remains effectively the same even when the reduction ratio changes, a large torque can be obtained even at a low reduction ratio. In addition, the large hollow diameter makes it easy for wiring, piping, shafts and the like to go through, greatly enhancing the degree of freedom you can enjoy in designing robots and devices. Helps improve the productivity.

Designed for maximum performance.
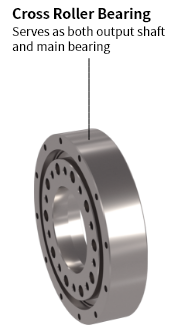
The use of a differential reducer mechanism (eccentric oscillation type) achieves high torsional rigidity and high allowable torque. As well, the cross roller bearing integrated with the output shaft keeps the unit compact while ensuring higher moment stiffness. Even if the reduction Ratio changes, the Meshing does not change so the allowable torque is constant. High torque can be obtained even at low reduction ratios.

The large hollow shaft enhances freedom of design.
The large hollow shaft not only makes it easier to pass wiring, piping, shafts, etc. but also enables increased wiring, encompassing even thick wires. It avoids interference with the robot body or peripheral devices, reducing bending and tensile loads.

The structure of the high-stiffness reducer is demonstrated in a video.
Release date: 2021.7.27 Click the image to watch the video.
The video is on YouTube.