Gearmotors and Reducers
Speed Control Type

Features of the inverter
Functions of stopping by contact and pressing by contact
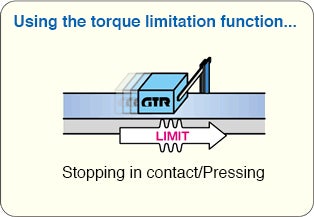
Executes a series of operations of “speed reduction” → “stopping by contact” → “pressing by contact” with one input signal.
Brake sequence function
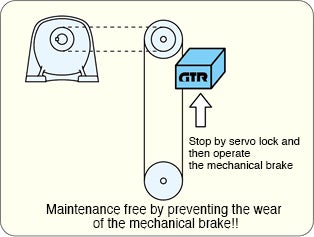
Sets the operation of the motor when the mechanical brake is opened and closed.
Simple servo lock
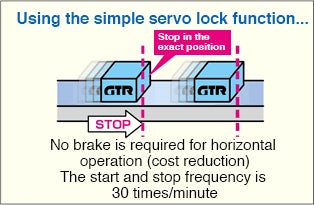
Executes position holding control to prevent the motor from rotating while the motor is stopped.
Equipped with RS485 communication as standard
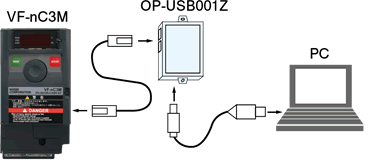
You can manage parameters and monitor the operation status by connecting this with PC.
You can easily control the inverter and construct the network by communication.
Features of gearmotors
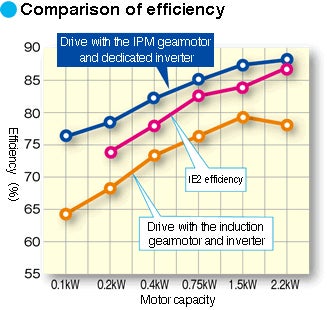
High-efficiency IPM gearmotor
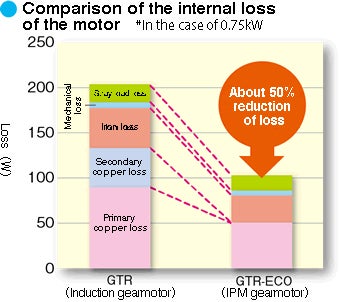
- This does not cause secondary copper loss because this carries no rotor current.
- The current of the motor is little because the permanent magnet causes magnetic flux.
- The efficiency of the motor alone exceeds IE3.
IPM high-efficiency control
- The inverter detects the motor rotation speed from the output voltage and current of the inverter unit without encoder.
- Since the efficiency of the IPM motor is maximized, this can realize higher efficency than IE2 even including the loss through the inverter thanks to the control to minimize the current under load.
Environment-friendly IPM gearmotor
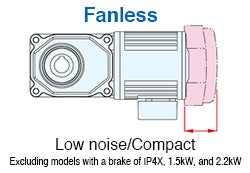
- The models of 0.75kW or less are fanless, so they are compact with noise, overall length, and mass reduced, which realizes downsizing and light weighting.
- Thanks to the brake sequence function of the inverter, the brake is maintenance-free, which improves the maintainability.
- This product is environment-friendly thanks to reduction of CO2 emissions during manufacturing and materials because it do not require such parts as the fan cover and fan nor service parts.
Environment-friendly as well as convenient!
- No slip occurs because this is a synchronous motor.
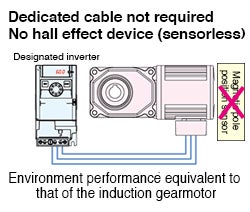
Even if the load changes, this will keep rotating at the rotation speed as specified in the frequency command value. - No dedicated cable is required
Since no magnetic pole position sensor is used, no signal cable is required and wiring is easy.
The installation is the same as that of the induction motor
Though the efficiency is high, the installation method is the same as that of the induction gearmotor.

Conformity to RoHS
Motor Power and Reduction Ratio
Motor Power
|
Reduction Ratio | |
|---|---|---|
| G3 (parallel shaft) | H2 (right angle shaft) | |
| 0.1KW | 1/5 to 1/1200 | 1/5 to 1/1500 |
| 0.2KW | 1/5 to 1/1200 | 1/5 to 1/1500 |
| 0.4KW | 1/5 to 1/1200 | 1/5 to 1/1500 |
| 0.75KW | 1/5 to 1/450 | 1/5 to 1/450 |
| 1.5KW | 1/5 to 1/200 | 1/5 to 1/240 |
| 2.2KW | 1/5 to 1/100 | 1/5 to 1/120 |
|
Motor Power
|
Reduction Ratio | ||
|---|---|---|---|
| FS (hollow shaft) | FAS (hollow shaft) | FF (solid shaft) | |
| 0.1KW | 1/10 to 1/1500 | – | 1/10 to 1/240 |
| 0.2KW | 1/5 to 1/1500 | – | 1/5 to 1/240 |
| 0.4KW | 1/5 to 1/1500 | 1/600 to 1/1500 | 1/5 to 1/240 |
| 0.75KW | 1/5 to 1/450 | 1/300 to 1/450 | 1/5 to 1/240 |
| 1.5KW | 1/5 to 1/240 | 1/5 to 1/240 | – |
| 2.2KW | 1/5 to 1/120 | 1/5 to 1/120 | – |
Motor Power
|
Reduction Ratio | |
|---|---|---|
| F3S (concentric hollow shaft) | F3F (concentric solid shaft) | |
| 0.1KW | 1/5 to 1/1500 | 1/5 to 1/240 |
| 0.2KW | 1/5 to 1/1200 | 1/5 to 1/240 |
| 0.4KW | 1/5 to 1/600 | 1/5 to 1/240 |
| 0.75KW | 1/5 to 1/300 | 1/5 to 1/240 |
| 1.5KW | 1/5 to 1/240 | 1/5 to 1/60 |
| 2.2KW | 1/5 to 1/120 | 1/5 to 1/30 |